You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Heading sensor and Transducer performance on new TZT3
- Thread starter DaVapors
- Start date



I would address that radar array (Lack of proper sealing) before water gets in, if it was my boat.
Thx Johnny! My bro-in-law and I are planning on sealing it up next Friday. I am planning to have him follow the instructions in the manual, but is there a particular brand of sealant that is best for this application (pun intended)?I would address that radar array (Lack of proper sealing) before water gets in, if it was my boat.View attachment 4205
The radar array ships with 3Bond brand but white Permatex silicone sealant or similar should work if they lost the regular stuff.
jp498
Furuno Super Fan
I use the thru-hull DFF3D and suggest it for 600' or less. I was reviewing a customer's PBG recordings last week and they made some nice recordings of 900' deep bottom! This is in Maine water which has a lot more less clarity than the southerns parts of the US. 200KHZ 1kw is good for 600' no problem. 50khz at least 1200' for a good thru-hull 1kw transducer and 1kw sounder/mfd. Too strong TVG/STC settings could mess up function as well; might note your settings and reset the sounder configuration.
As mentioned, It would be better for the SCX20 to be not just away from the radar base, but out from under the shadow of the spinning radar antenna. That's a piece of metal (light as it is) that covers the SCX20 when it passes over it. Like radar, the satellite signals are all line of sight only.
As mentioned, It would be better for the SCX20 to be not just away from the radar base, but out from under the shadow of the spinning radar antenna. That's a piece of metal (light as it is) that covers the SCX20 when it passes over it. Like radar, the satellite signals are all line of sight only.
Found the ThreeBond in w/ my paperwork!
edit: found a 2nd tube as well. Any guesses what else should be inspected for sealing? Sorry for the dumb questions!
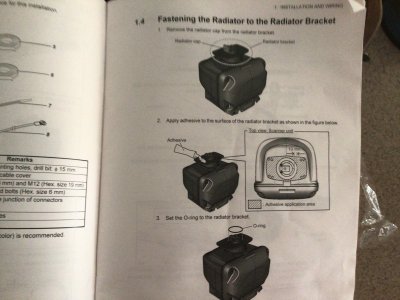
edit2: here is a pic from the manual showing the radiator bracket and scanner unit. Is this the part missing the ThreeBond?
edit: found a 2nd tube as well. Any guesses what else should be inspected for sealing? Sorry for the dumb questions!
edit2: here is a pic from the manual showing the radiator bracket and scanner unit. Is this the part missing the ThreeBond?
Attachments

Last edited:
Yes that is the part missing the sealant but the manual has steps to seal that along with put some sealant on the bolt threads before inserting. The sealant should cover those bolt heads, then the manual has you put some sealant on the ground connection to keep it dry as well as the gearbox mounting bolts. You can't go wrong following the manual. Without sealant that scanner will be a 8K paperweight in a short amount of time. It is a very important step on installation.Found the ThreeBond in w/ my paperwork!
edit: found a 2nd tube as well. Any guesses what else should be inspected for sealing? Sorry for the dumb questions!
edit2: here is a pic from the manual showing the radiator bracket and scanner unit. Is this the part missing the ThreeBond?
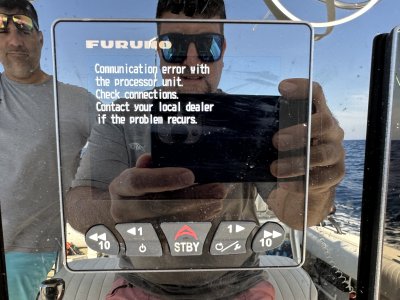
Had a slightly different (possibly related?) heading sensor error on Friday. See pic. The major difference was that I wasn’t in ruff seas and it randomly started happening after about 8hrs of use?? And kept happening, I eventually rebooted the Port TZT3 and that seemed to help a little.
Attachments
Keta
Member
I've seen that a few times with mine also. Personally I don't think it's a heading sensor problem but I could be wrong about that also. I also have the SCX20 but it looks like mine is a bit better positioned. Not optimal but I haven't had any problems with it seeing sky either.Had a slightly different (possibly related?) heading sensor error on Friday. See pic. The major difference was that I wasn’t in ruff seas and it randomly started happening after about 8hrs of use?? And kept happening, I eventually rebooted the Port TZT3 and that seemed to help a little.
I did swap out my entire NEMA backbone with a couple of Ancor 4 port units. Put the power supply between two 4 port units. Seems to be more secure versus a bunch of T's put together. So far so good but we'll see.
With the Navpilot 300 the processor gets power from two locations. The 2000 bus power the transceiver communication chip and the main processor gets it power from the main power cable. I recommend both these power from the same breaker so that the timing of the powering of the processor power and 2000 bus power happens at the same time. When 2000 bus power is provided by the processor isn't or powered at diffrent timing, it can lead to the 2000 pilot head not able to speak with the processor that is not ready.



If the other side is like that it looks pretty good except the bolt heads are normally recommended to be covered to keep water out of any possible scratches caused by the bolts cutting into the paint and allowing an area that water can start causing paint issues. Per the manual a small amount is put on the bolt thread and then the head is covered. 

An SC33 won't offer you anything you need beyond the SCX20. The SC33 will be larger and even harder to place. The SCX20 needs to move off the bouncing diving board mount (vibrations) and to where it isn't getting physically blocked so much by the radar. While it is good to get under the radar beam, it isn't good to get so close that it is blocking so many satellites that one direction.
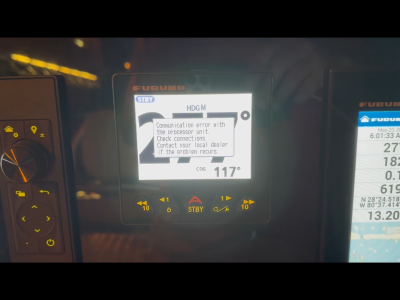
That looks to be a communication issue between the pilot processor and the pilot display. That doesn't appear heading or SCX20 related as you can even see the heading shown in the background. This error is most commonly caused by the wiring and power up process. Because the pilot processor receives power in two places (Main input power and NMEA 2000 power) it is normally a good idea to place the NMEA 2000 bus power on the same breaker with the Pilot so that the processor will get power whenever the display has power via the 2000 bus. We have had a few others here on the forum that has seen that and those were resolved by removing the possibility of the pilot display to be turned ON without the pilot processor also having it's power turned ON.
Similar threads
- Replies
- 3
- Views
- 722
- Replies
- 9
- Views
- 6K
