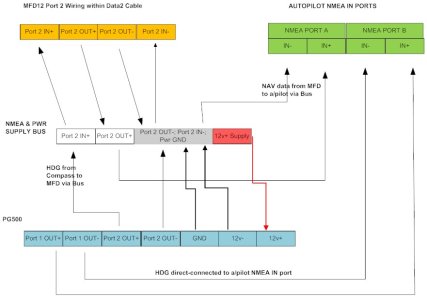
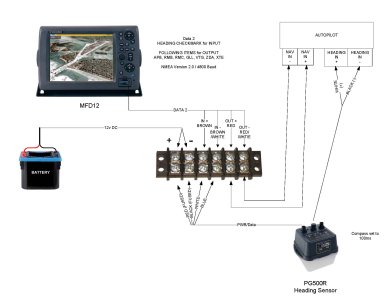
I am installing a PG500 for the first time. I have connected the center NMEA port directly to my NavNet3D and I have connected the Power/NMEA port to my (non-Furuno) autopilot. I have NOT completed the 'Correcting Magnetic Field Distortion' open water step in installation yet, but I am getting heading output data on both my NavNet3D and on my autopilot.
Two questions: using the port monitor function on my NavNet MFD, I can see I am getting five consecutive sentences of the form $HCHDG,127.3,,,,*45 ( a normal sentence I think) AND after every 5 of these sentences, I get this single sentence: $PFEC,hdcom, N,Er,0010*05....then the 5 standard heading sentences appear again, and so on. I know the $PFEC is a proprietory Furuno NMEA 0183 sentence: but what does it mean and should this disappear when I complete the 'Correcting Magnetic Field Distortion" open water installation step?
Second: although the heading appears on my autopilot initially, within a few moments IF THE NAVNET3D MFD IS NOT POWERED UP, the autopilot generates a Heading Lost error msg. I don't understand how this could happen when the autopilot and the MFD are independently connected to the PG500. In fact, one of the reasons I went with the PG500 was to achieve some redundancy between chartploter and autopilot (if either one of them went down, I expected to still have a heading output on the other). The only connection between the MFD and autopilot is the NAV data sent from MFD to a/pilot when a GoTo command is activated on the MFD...but given the autopilot's loss of Heading data occurs when the MFD is off, no NAV data is being output. Could the problem be related to the periodic $PFEC msg noted above and be likely to disappear once the 'Correcting Magnetic Field Distortion' installation step is completed?
thanks in advance for feedback.
Two questions: using the port monitor function on my NavNet MFD, I can see I am getting five consecutive sentences of the form $HCHDG,127.3,,,,*45 ( a normal sentence I think) AND after every 5 of these sentences, I get this single sentence: $PFEC,hdcom, N,Er,0010*05....then the 5 standard heading sentences appear again, and so on. I know the $PFEC is a proprietory Furuno NMEA 0183 sentence: but what does it mean and should this disappear when I complete the 'Correcting Magnetic Field Distortion" open water installation step?
Second: although the heading appears on my autopilot initially, within a few moments IF THE NAVNET3D MFD IS NOT POWERED UP, the autopilot generates a Heading Lost error msg. I don't understand how this could happen when the autopilot and the MFD are independently connected to the PG500. In fact, one of the reasons I went with the PG500 was to achieve some redundancy between chartploter and autopilot (if either one of them went down, I expected to still have a heading output on the other). The only connection between the MFD and autopilot is the NAV data sent from MFD to a/pilot when a GoTo command is activated on the MFD...but given the autopilot's loss of Heading data occurs when the MFD is off, no NAV data is being output. Could the problem be related to the periodic $PFEC msg noted above and be likely to disappear once the 'Correcting Magnetic Field Distortion' installation step is completed?
thanks in advance for feedback.