You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
NavPilot 511 and N-Viewer thru TZT14
- Thread starter sheakx
- Start date

- Status
- Not open for further replies.
M
Melville
Guest
In order for the TZT14 to receive rudder angle from the NavPilot 511 it must be converted to NMEA2000. You can use our IF-NMEA2K2 convereter to bring NMEA0183 into the TZT as MNEA2000. You must also be sure to set the NMEA0183 output on the NavPilot to transmit the RSA message.
I did the NMEA2000 conversions for the auto pilot and VHF radio when I installed the TZT unit and they all are talking well together. I need to check to see if I have the RSA message enabled. When I looked for rudder angle on the message setup for the NavPilot, as I recall it just said "Furuno Specified" or something like that. I didn't see a message string for rudder angle. I'll check.
Thanks,
Thanks,
When you wired the NMEA 2000 interface to the pilot; you would have the output wires going to drive the pilot. Normally the input wires of the interface would get heading from your compass for the TZtouch (not from the pilot). How do you have it wired?
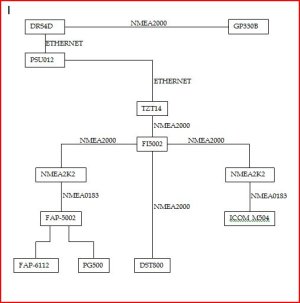
Attached is how I set up the network for my installation. The FAP-5002 is connected to the NMEA2K2 via the In/Out Port. The TZT14 gets the heading information from the FAP-5002. Based on my research, this seemed like the best solution. I still can't get the rudder angle to display on the N-viewer even though the setup appears correct to me. I thought I might have some wires crossed but if that was the case, I wouldn't be getting heading information to the TZT14. Thoughts?
Attachments
Great drawing; thanks!
I would have to guess that you are running the interface (IF-NMEA2k2) connected to the autopilot at 4800 baud (normal mode)?
I would have to guess that you are running the interface (IF-NMEA2k2) connected to the autopilot at 4800 baud (normal mode)?
Yes, you would need to setup the interface and the NavPilot to 38,400 baud (high speed mode) for the "RSA" sentence to function within the IF-NMEA2k2 interface.
I attempted to change the setup by changing the baud rate on the NAVpilot output to 38,400 and also changing it on the NMEA2K2 by connecting the black and purple wires and disconnecting the orange wire. This did not get me a rudder angle reading and also made me lose the heading information that the TZT14 was getting from the NAVpilot. I changed everything back to 4800 and the heading information came back. The heading is more important for operation of the TZT14 so I will stick with that setup for now. Did I miss something in the conversion to 38,400? Is there a better network setup than the one I have in my drawing?
Your setup/drawing looks good.
When changing the interface (IF-NMEA2k2) "MODE"; I have found that you have to power it up after changing the mode, then disconnected it from power again a second time. It seems the unit needs to power up and see the mode change and then be power cycled to start working in the "new" mode. I would suspect that you did everything correctly except for the unpublished power cycle. You might try the process again. We have asked Japan to make some changes to the manual because of our discussions here. Thanks taking the time on the Forum and let me know how it works out.
When changing the interface (IF-NMEA2k2) "MODE"; I have found that you have to power it up after changing the mode, then disconnected it from power again a second time. It seems the unit needs to power up and see the mode change and then be power cycled to start working in the "new" mode. I would suspect that you did everything correctly except for the unpublished power cycle. You might try the process again. We have asked Japan to make some changes to the manual because of our discussions here. Thanks taking the time on the Forum and let me know how it works out.
The double power cycle worked and everything is communicating at 38,400 baud now. Thanks for your help.
One additional question. I have the wireless setup to connect at startup but it seems that I have to always go to the menu and connect manually and put in the password. Is there a way to make this happen automatically? The boat's wireless network is always on. Alternately, can I connect to the router directly via an ethernet cable?
Thanks...
One additional question. I have the wireless setup to connect at startup but it seems that I have to always go to the menu and connect manually and put in the password. Is there a way to make this happen automatically? The boat's wireless network is always on. Alternately, can I connect to the router directly via an ethernet cable?
Thanks...
You cannot connect up the MFD to the internet via Ethernet. If you have the wireless setup to "At Startup or As Necessary" and setup to connect to the internet; it should work fine for updating weather anytime you need it. If you are running ipads/iphones then the unit is acting as a server (letting things connect to the TZT) and it won’t connect up to the internet until you change modes and connect. I haven’t had any reported problems with connecting to the internet automatically when the settings are left to connect at startup or as necessary. The next version of software for the TZT (V2) is planned to release in the next 30 to 60 days. Maybe this will make a change to what you are seeing with your unit. I am glad you were able to get the interface setup to 3,8400 high speed mode. :jump
A
Anonymous
Guest
I have a MFDBB and a Navpilot 511, I want to use the if-nmea2k2 to make my pilot nmea 2000 compatible. A similar setup in other words.
I want to receive rudder and heading from my pilot into nmea200 network.
I want to send gps, depth and steering data from MFDBB to the pilot via nmea2000.
Will the if-nmea2k2 do this job? Do I need to configure anything to make it work?
I want to receive rudder and heading from my pilot into nmea200 network.
I want to send gps, depth and steering data from MFDBB to the pilot via nmea2000.
Will the if-nmea2k2 do this job? Do I need to configure anything to make it work?
Until the IF-NMEA2K2 receives new software; it cannot be used for an autopilot including Furuno's. The NN3D offers both 0183 and NMEA 2000 support. You are better off running NMEA 0183 than adding data delays by inserting an interface and running NMEA 2000 with your NMEA 0183 pilot.
A
Anonymous
Guest
From the online manual it looks like it can output nmea0183 DPT and RMB but not TTM
I also see it can convert nmea0183 GGA, HDT, RSA, ZDA into nmea2000 so I should be covered this direction.
Could you explain what is stopping the interface from doing the autopilot, am I missing something or is the manual not correct?
I am also looking into using a Actisense NGW-1 as I understand it can be customized what PGN will be received and transmitted.
http://www.actisense.com/Downloads/Documents/NGW-1/Additional/NGW-1 Conversion List issue 2.199.pdf
(I am aware of the other option using nmea0183 directly)
I also see it can convert nmea0183 GGA, HDT, RSA, ZDA into nmea2000 so I should be covered this direction.
Could you explain what is stopping the interface from doing the autopilot, am I missing something or is the manual not correct?
I am also looking into using a Actisense NGW-1 as I understand it can be customized what PGN will be received and transmitted.
http://www.actisense.com/Downloads/Documents/NGW-1/Additional/NGW-1 Conversion List issue 2.199.pdf
(I am aware of the other option using nmea0183 directly)
The interface doesn't put out APB (currently) which keeps it from working with most pilots. They are still working on the reason it has problems with the NavPilot 500 in proprietary mode. The interface works well for other uses but until the next firmware update; it won't work for an autopilot. I have heard that Actisense works well in most case for interfacing a pilot.
A
Anonymous
Guest
Johnny Electron":favtyt5l said:.... but until the next firmware update; it won't work for an autopilot.
What is the expected release date for this update? And, how do we apply a firmware update to NMEA2K2s already installed? I bought an NMEA2k2 specifically to interface my TZT9 to an autopilot.
- Status
- Not open for further replies.
Similar threads
- Replies
- 5
- Views
- 428
