
A
Anonymous
Guest
Hi all,
this is my first post so let me introduce myself: my name is Francesco and I come from Italy. I'm 40 years old and I use to sail with my family on a "Dufour 40" Sailing boat that's located near Genova, in the mediterranean sea.
I admit I crossposted on the Raymarine forum the same question I hope you'll never mind
I hope you'll never mind ")
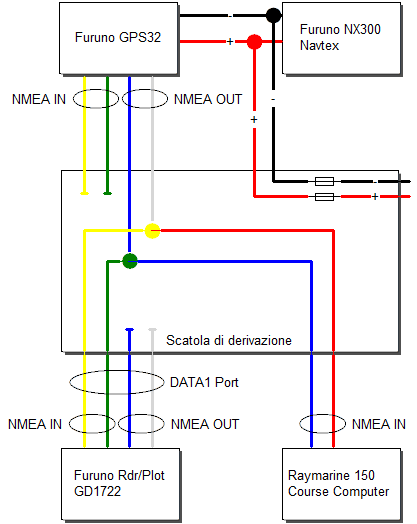
This boat is 10 years old and the previous owner installed all the instrumentation. In particular there are:
Furuno Chartplotter GD1700
Furuno GPS Receiver GPS32
Raymarine Smartpilot S2 (not sure) + ST6001 controller
Raymarine ST60 Wind
Raymarine ST60 Tridata
Raymarine ST60 Graphic Display
I'm quite new to nautical instruments, so please, excuse me if I use wrong terms or I miss something.
The GD1700 and the GPS32 are connected using the DATA1 port. I think (quite sure) that the GPS32 send position informations to the Chartplotter. Even if the GPS32 is a navigator, I only use the chartplotter for navigation purposes (I don't set waypoint on the GPS32, only in the Chartplotter).
Raymarine instruments are connected using Seatalk 1.
Is there a way to connect the Chartplotter to the Raymarine autopilot? If so, what will I be able to do once they are connected? (e.g. let the autopilot follow the route on the chartplotter?)
On the autopilot main unit there are two NMEA port (2xIN e 2xOUT). I think that NMEA should be used to connect.
Just to remember, those are NMEA senteces the GD1700 is able to send:
AAM - Waypoint Arrival Alarm
APB - Auto Pilot B sentence
BOD - Bearing Origin to Destination
BWC - Bearing using Great Circle route (BWR - Bearing using Rhumb Line)
DPT - Heading – Deviation & Variation
GGA - Fix information
GLL - Lat/Lon data
GTD - Geographic Location in Time Differences
MTW - Water Temperature
RMA - recommended Loran data
RMB - recommended navigation data for gps
RMC - recommended minimum data for gps
VHW - Water Speed and Heading
VTG - Vector track an Speed over the Ground
WPL - Waypoint Location information
XTE - measured cross track error
ZDA - Date and Time
HDT - Heading – True
HDG - Heading – Deviation & Variation
MWV - Wind Speed and Angle
TTM - Tracked Target Message
and those are the NMEA senteces the chartplotter is able to read:
Own ship’s position: GGA>RMC>RMA>GLL
Ship’s speed: RMC>RMA>VTG>VHW
External waypoint: RMB>WPL>BWR>BWC
Heading (True): HDT>HDG>HDM
Course: RMC>RMA>VTG
Depth: DPT>DBT
Temperature: MTW
Time: ZDA
Other ship’s information: TTM
Insight satellite information: GSV
Wind speed and angle: MWV>VWT>VWR
Thank you for your help
Francesco
this is my first post so let me introduce myself: my name is Francesco and I come from Italy. I'm 40 years old and I use to sail with my family on a "Dufour 40" Sailing boat that's located near Genova, in the mediterranean sea.
I admit I crossposted on the Raymarine forum the same question
I hope you'll never mind This boat is 10 years old and the previous owner installed all the instrumentation. In particular there are:
Furuno Chartplotter GD1700
Furuno GPS Receiver GPS32
Raymarine Smartpilot S2 (not sure) + ST6001 controller
Raymarine ST60 Wind
Raymarine ST60 Tridata
Raymarine ST60 Graphic Display
I'm quite new to nautical instruments, so please, excuse me if I use wrong terms or I miss something.
The GD1700 and the GPS32 are connected using the DATA1 port. I think (quite sure) that the GPS32 send position informations to the Chartplotter. Even if the GPS32 is a navigator, I only use the chartplotter for navigation purposes (I don't set waypoint on the GPS32, only in the Chartplotter).
Raymarine instruments are connected using Seatalk 1.
Is there a way to connect the Chartplotter to the Raymarine autopilot? If so, what will I be able to do once they are connected? (e.g. let the autopilot follow the route on the chartplotter?)
On the autopilot main unit there are two NMEA port (2xIN e 2xOUT). I think that NMEA should be used to connect.
Just to remember, those are NMEA senteces the GD1700 is able to send:
AAM - Waypoint Arrival Alarm
APB - Auto Pilot B sentence
BOD - Bearing Origin to Destination
BWC - Bearing using Great Circle route (BWR - Bearing using Rhumb Line)
DPT - Heading – Deviation & Variation
GGA - Fix information
GLL - Lat/Lon data
GTD - Geographic Location in Time Differences
MTW - Water Temperature
RMA - recommended Loran data
RMB - recommended navigation data for gps
RMC - recommended minimum data for gps
VHW - Water Speed and Heading
VTG - Vector track an Speed over the Ground
WPL - Waypoint Location information
XTE - measured cross track error
ZDA - Date and Time
HDT - Heading – True
HDG - Heading – Deviation & Variation
MWV - Wind Speed and Angle
TTM - Tracked Target Message
and those are the NMEA senteces the chartplotter is able to read:
Own ship’s position: GGA>RMC>RMA>GLL
Ship’s speed: RMC>RMA>VTG>VHW
External waypoint: RMB>WPL>BWR>BWC
Heading (True): HDT>HDG>HDM
Course: RMC>RMA>VTG
Depth: DPT>DBT
Temperature: MTW
Time: ZDA
Other ship’s information: TTM
Insight satellite information: GSV
Wind speed and angle: MWV>VWT>VWR
Thank you for your help
Francesco
 Very Good news! :jump
Very Good news! :jump 