
crck0848
Furuno Fan
Can anybody suggest why my autopilot consistently tracks 10-15 yards to the starboard side of my route? In all other aspects, the system performs great, but it always runs to the right of where it should be.
[EDIT: PROBLEM SOLVED. This issue was happening because the SCX20 satellite compass was not correctly aligned with the ship centerline. In other words, the SCX20 was mounted with a heading offset of 2.5 degrees and I did not compensate for it. I fixed the problem by adding a heading offset in the SCX20 setup page. Now the autopilot tracks straight and true. Skip to the end of this thread for details on how I calibrated heading.]
(I also replied to an older thread here: https://furunousaforum.com/threads/20382)
TZT16F chartplotters
SCX20 satellite compass
NavPilot 711C autopilot
My heading doesn't matter ... I'm always offset to the starboard side of the route. If I manually steer back to the route and reengage the AP, it always deviates back to starboard.
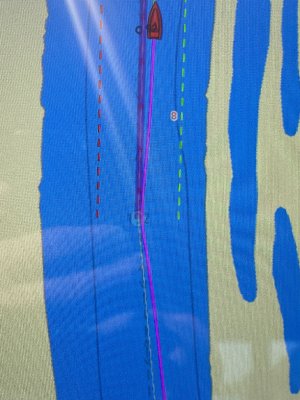
See attached screenshot: As I approach the waypoint, I'm offset to the right. The AP steers left to get back onto the route, goes directly over the waypoint, then steers right until it's 10-15 yards off the route again. It's particularly annoying when I'm in a narrow channel or canal. The frequent direction changes confuse nearby vessels.
Grateful for any suggestions.
[EDIT: PROBLEM SOLVED. This issue was happening because the SCX20 satellite compass was not correctly aligned with the ship centerline. In other words, the SCX20 was mounted with a heading offset of 2.5 degrees and I did not compensate for it. I fixed the problem by adding a heading offset in the SCX20 setup page. Now the autopilot tracks straight and true. Skip to the end of this thread for details on how I calibrated heading.]
(I also replied to an older thread here: https://furunousaforum.com/threads/20382)
TZT16F chartplotters
SCX20 satellite compass
NavPilot 711C autopilot
My heading doesn't matter ... I'm always offset to the starboard side of the route. If I manually steer back to the route and reengage the AP, it always deviates back to starboard.
See attached screenshot: As I approach the waypoint, I'm offset to the right. The AP steers left to get back onto the route, goes directly over the waypoint, then steers right until it's 10-15 yards off the route again. It's particularly annoying when I'm in a narrow channel or canal. The frequent direction changes confuse nearby vessels.
Grateful for any suggestions.
Attachments
Last edited:


