Thanks C-Bass, instillation location should be all good, followed the procedure, low in the boat, near centre of gravity, not near and metals or electronics.
I think you solved by issue, i wasn't comparing it to the COG of the TZT2, just the magnetic compass. I got on the water today and the heading matched the COG to within a degree or 2 at all times. As long as they align then my marks to the port and starboard from the DFF3D should be pretty accurate right? The error could be with the Richie compass, as it still doesn't match the electronics too well.
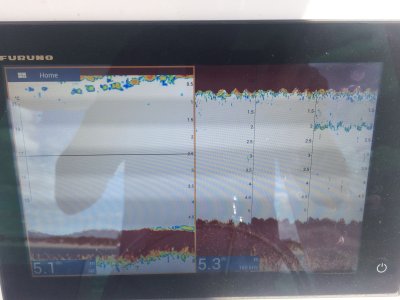
On a side note i have a few questions on the DFF3d, i have attached a photo of the multibeam sonar from TM54 and inbuilt TZT2 sonar with TM260. The issue is the depth at which the display starts, the TZT2 sonar starts at 0.2m which is the tm260 draft setting, the multibeam sonar starts at 0.7m approx, even with the transducer draft set at 0m. Applying the transducer draft will only be added to this 0.7m, so adding 0.2m will result in the reading starting at 0.9m. I've been through all the settings that i think could be causing the issue, but no luck. No idea where the 0.7 comes from, any ideas?
Another query was regarding reading the bottom at cruising speed, i had the boat at about 21 knots, the TM260 at 200khz was reading bottom unbroken at a depth of 4-6m. The multibeam however was breaking up at anything over 15 knots. The transducers are at the same depth and different sides of the boat about 0.3m from the keel. Just wondering if there are any reasons on why this is? I was running the beam width and angle on maximum values. Not sure if this has anything to do with it?
Other points to note:
- I noticed that the performance seemed to improve a bit in deeper water (7 to 8m), but was still broken.
- I did some sharp turns and the readings cleaned up and were unbroken, i'm not sure if this is to do with the transducer position in the turn, or just that the loss of speed improves the reading.
- The B54 is attached to an existing plate on the starboard side, but will need to be moved further starboard, as the motor blocks the outermost edge of the swath and is causing minimal noise. Just need another plate welded to make the adjustment.
Thanks for the help!
I think you solved by issue, i wasn't comparing it to the COG of the TZT2, just the magnetic compass. I got on the water today and the heading matched the COG to within a degree or 2 at all times. As long as they align then my marks to the port and starboard from the DFF3D should be pretty accurate right? The error could be with the Richie compass, as it still doesn't match the electronics too well.
On a side note i have a few questions on the DFF3d, i have attached a photo of the multibeam sonar from TM54 and inbuilt TZT2 sonar with TM260. The issue is the depth at which the display starts, the TZT2 sonar starts at 0.2m which is the tm260 draft setting, the multibeam sonar starts at 0.7m approx, even with the transducer draft set at 0m. Applying the transducer draft will only be added to this 0.7m, so adding 0.2m will result in the reading starting at 0.9m. I've been through all the settings that i think could be causing the issue, but no luck. No idea where the 0.7 comes from, any ideas?
Another query was regarding reading the bottom at cruising speed, i had the boat at about 21 knots, the TM260 at 200khz was reading bottom unbroken at a depth of 4-6m. The multibeam however was breaking up at anything over 15 knots. The transducers are at the same depth and different sides of the boat about 0.3m from the keel. Just wondering if there are any reasons on why this is? I was running the beam width and angle on maximum values. Not sure if this has anything to do with it?
Other points to note:
- I noticed that the performance seemed to improve a bit in deeper water (7 to 8m), but was still broken.
- I did some sharp turns and the readings cleaned up and were unbroken, i'm not sure if this is to do with the transducer position in the turn, or just that the loss of speed improves the reading.
- The B54 is attached to an existing plate on the starboard side, but will need to be moved further starboard, as the motor blocks the outermost edge of the swath and is causing minimal noise. Just need another plate welded to make the adjustment.
Thanks for the help!