flowmotion
Furuno Fan
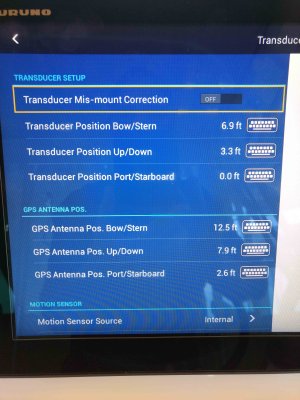
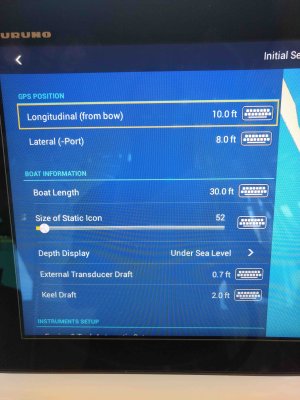
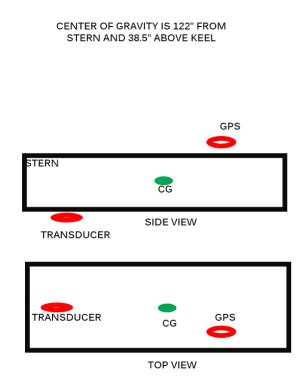
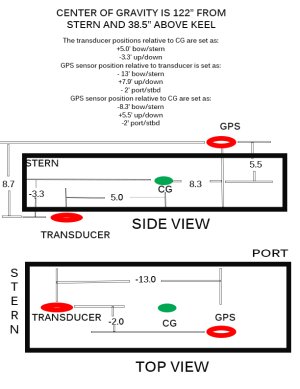
I am using the DFF-3D module with the 165T-B54 thru-hull transducer. The transducer is mounted on the center line of the boat. I entered all the motion sensor positions in the setup menu and am using the internal motion sensor. The MFD is the TZT2.
As the boat rolls the cross section display also rolls. Does this indicate the motion sensor is set up incorrectly or not functioning properly? The initial setup menu - DFF-3D monitoring shows changes to the pitch and roll values so I think the unit is attempting to compensate.
The end result is an undulating bottom picture. Please advise on is this is normal or additional evaluation steps.
Video of cross section https://www.youtube.com/watch?v=xzJwxxH ... e=youtu.be
Thank you
As the boat rolls the cross section display also rolls. Does this indicate the motion sensor is set up incorrectly or not functioning properly? The initial setup menu - DFF-3D monitoring shows changes to the pitch and roll values so I think the unit is attempting to compensate.
The end result is an undulating bottom picture. Please advise on is this is normal or additional evaluation steps.
Video of cross section https://www.youtube.com/watch?v=xzJwxxH ... e=youtu.be
Thank you